Penggerak Kereta dengan Kendali Remote RF 433MHz

Anisa Chandra Wibawa1 ;
M. Zaenal Antoni Cahaya Putra 2, Samuel BETA3
Prodi
Teknik Elektronika Jurusan Teknik Elektro Politeknik Negeri Semarang
Jl.
Prof. H. Soedarto, SH, Tembalang, Semarang, 50275
Abstrak – Penggerak Kereta dengan Kendali
Remote Rf 433MHz menggunakan NUC 120 sebagai pemrosesnya.
Alat ini menggunakan remote kontrol berbasis RF433Mhz untuk menggerakkan
penggerak. RF433Mhz adalah modul yang terdiri dari dua rangkaian, yaitu rangkaian receiver
(RX) sebagai penerima data dan rangkaian transmiter (TX) sebagai
pengirim data. Transmitter (pemancar) dapat dibawa kemana-mana sesuai keinginan
pengguna, dan receiver (penerima)
dipasang di dalam box sebagai penerima sinyal dari transmitter yang
kemudian akan menggerakkan motor. Penggerak yang digunakan adalah 2 buah motor
DC. Motor DC dipasang di sisi kiri dan kanan, akan bergerak sesuai dengan
inputan remote RF 433MHz, bekerja dengan cara mengubah tegangan menjadi energi
gerak. Alat ini juga menggunakan driver motor sebagai pengontrolnya. Jenis
driver yang digunakan adalah L298N yang merupakan modul Dual H Bridge pengatur
motor DC yang digunakan pada output ARM.
Kata
kunci: NUC 120, RF433Mhz, Motor DC,
Driver Motor L298N.
Abstract -
Tracer with Remote
Control Rf 433MHz using NUC 120 as its processor. This tool uses RF433Mhz based
remote control to drive the drive. RF433Mhz is a module consisting of two
circuits, the receiver circuit (RX) as the data receiver and transmitter
circuit (TX) as the data sender. Transmitter (transmitter) can be carried
everywhere according to the wishes of the user, and receiver (receiver)
installed in the box as a signal receiver from the transmitter which will then
move the motor. The drive used is 2 pieces of DC motor. DC motor mounted on the
left and right, will move according to RF remote 433MHz input, work by
converting the voltage into motion energy. This tool also uses the motor driver
as its controller. The type of driver used is the L298N which is a Dual H
Bridge module DC motor controller used on the ARM output.
Keywords: NUC 120, RF433Mhz, DC
Motor, Motor Driver.
I.
PENDAHULUAN
1.1
Latar Belakang
Seiring
berkembangnya zaman, tentunya dibutuhkan kecanggihan dalam pemakaian berbagai
alat. salah satunya yaitu dibutuhkan pengendali jarak jauh dalam pemakaian
suatu alat. Penggerak Kereta dengan Kendali Remote RF 433MHz merupakan
prototipe kursi roda pintar yang biasa dipakai di rumah sakit. Penggerak kereta
ini dapat bergerak maju, mundur, kiri, dan kanan sesuai dengan perintah yang
ditekan pada remote.
1.2
Tujuan
Adapun tujuan dari pembuatan alat
ini adalah:
1.
Memudahkan
pengguna untuk mengendalikan kereta jarak jauh.
2.
Membuat
kereta dengan kendali jarak jauh dengan gerak maju, mundur, kiri, dan kanan.
1.3
Rumusan
Masalah
Adapun rumusan masalah dari pembuatan
alat ini adalah:
1. Bagaimana
cara membuat alat yang dapat memudahkan pengguna untuk mengendalikan kereta jarak jauh?
2. Bagaimana
cara membuat kursi roda dengan kendali jarak jauh agar dapat bergerak maju,
mundur, kiri, dan kanan?
1.4
Pembatasan Masalah
Berdasarkan rumusan masalah di atas, agar pembahasan terfokus pada perumusan masalah yang akan dibahas pada alat ini sebagai berikut :
1. Alat Penggerak
Kereta dengan Kendali Remote RF 433MHz masih dibuat dalam bentuk prototipe.
2. Remote RF
433MHz digunakan untuk memilih menu arah kereta secara
terprogram.
3. Jarak maksimal
transmiter dan receiver remote adalah 20 meter tanpa ada benda yang menghalangi.
4. Alat dapat
bekerja dengan baik hanya dengan menekan satu tombol saja (tidak menekan tombol
lain dengan bersamaan).
1.5
Metodologi
1. Metode Persiapan
Berisikan
tentang pemilihan materi serta jurnal yang akan dijadikan dasar atau literatur
dalam pembuatan alat Penggerak Kereta dengan Kendali Remote RF 433MHz.
2. Metode
Perencanaan
Menentukan rancangan sistem, alat, serta program aplikasi yang akan
digunakan dalam pembuatan alat Penggerak Kereta dengan Kendali Remote RF
433MHz.
3.
Metode Perancangan
Pembuatan program Remote RF 433MHz sebagai masukan, driver motor sebagai
pengendali, dan motor DC sebagai keluaran pada NUC 120.
4. Pengujian
Alat
Melakukan pengujian alat Penggerak Kereta dengan Kendali Remote RF
433MHz, apakah sudah sesuai rencana atau belum.
5. Tahap
Penyusunan Laporan
Menyusun laporan hasil dari pembuatan alat dalam bentuk laporan
penelitian.
II.
TINJAUAN PUSTAKA
2.1
ARM
NUC120
Modul NUC 120
dapat bekerja dengan kecepatan CPU sampai dengan 48MHz. Modul ini juga telah
dilengkapi dengan bootloader internal, sehingga tidak diperlukan lagi device
program eksternal. Pemrograman melalui bootloader dapat
dilakukan dengan menggunakan koneksi USB.

Gambar 1 ARM NUC 120
Spesifikasi ARM NUC120:
a. Berbasis
mikrokontroler NUC120RD2BN (64 KB APROM, 8 KB SRAM, 4 KB Data Flash, CPU ARM
Cortex-M0).
b. Terintegrasi
dengan cystal eksternal 12 MHz.
c. Terintegrasi
dengan osilator 32.768 kHz sebagai sumber clock RTC.
d. Memiliki
1x port USB.
e. Memiliki
1 port RS-485.
f. Memiliki
3 kanal UART dengan level tegangan TTL 3.3VDC / 5VDC.
g. Tersedia
port USB yang berfungsi untuk antarmuka serial sekaligus menuliskan progra mikrokontroler, sehingga tidak membutuhkanprogrammer eksternal.
h. Memiliki
port Serial Wire Debug untuk proses debuging dan programming.
i. Memiliki
45 jalur GPIO.
j. Terintegrasi
dengan sensor suhu internal.
k. Memiliki
port input 8 kanal ADC 10-bit.
l. Bekerja
pada level tengan 3,3VDC / 5VDC dengan arus maksimum 800mA.
m. Input
catu daya untuk board : 6,5VDC - 12VDC / 3,3VDC - 5VDC.
2.2
Modul RF433Mhz
Rangkaian modul RF433 terdiri dari dua
rangkaian yaitu rangkaian receiver (RX) sebagai penerima data dan rangkaian
transmiter (TX) sebagai pengirim data. RF433 adalah rangkaian pengirim dan
penerima data yang berbasis ASK (Aplitude – Shift Keying). Pada rangkaian
receiver tersebut terdapat 3 pin yaitu VCC, ground, danpin data. Tengangan
masukan untuk modul ini bernilai 5 volt

Gambar 2 Modul Radio Frekuensi
tipe RF433Mhz
Modul RF315/433MHz yang umumnya beredar
tidak dilengkapi dengan antenna sehingga jangkauannya hanya beberapa cm. Agar
jangkauannya bisa jauh hingga ratusan meter, maka penulis perlu menyolder
antenna ke modul tersebut. Penulis dapat menggunakan kawat tembaga sebagai
antenna. Adapun ukuran kawat yang digunakan untuk modul 433MHz dapat
menggunakan kawat dengan ukuran sekitar 17cm.
2.3
Driver
Motor L298N
Driver
motor L298N merupakan driver motor
yang paling populer digunakan untuk mengontrol kecepatan dan arah pergerakan
motor terutama pada robot line foller / line tracer.
Kelebihan
dari driver motor L298N ini adalah cukup presisi dalam mengontrol motor. Selain
itu, kelebihan driver motor L298N adalah mudah untuk dikontrol.
Untuk
mengontrol driver L298N ini dibutuhkan 6 buah pin mikrokontroler.

Gambar 3 Modul Driver Motor
Dua
buah untuk pin Enable ( satu buah untuk motor pertama dan satu buah yang lain
untuk motor kedua. Karena driver L298N ini dapat mengontrol dua buah motor DC)
4 buah untuk mengatur kecepatan motor motor tersebut. Skematik rangkaian driver
motor L298N harus ditambahkan beberapa komponen lagi agar dapat bekerja. Yang
pertama berupa rangkaian regulator yang berada dibagian atas skematik. dan yang
kedua adalah rangkaian pendukung driver motor yang berupa beberapa dioda.
Output dari rangkaian ini sudah berupa dua pin untuk masing masing motor. Pada
prinsipnya rangkaian driver motor L298N ini dapat mengatur tegangan dan arus
sehingga kecepatan dan arah motor dapat diatur.
2.4
Motor DC
Motor DC adalah motor yang
digerakkan oleh energi listrik arus searah. Salah satu jenis motor DC adalah
motor DC magnet permanen. Motor DC tipe ini banyak ditemui penggunaanya baik di
industri maupun di rumah tangga. Pada umumnya, penggunaan motor DC jenis ini adalah
untuk sumber – sumber tenaga yang kecil, seperti pada rumah tangga dan
otomotif. Sebuah motor DC magnet permanen biasanya tersusun atas magnet
permanen, kumparan jangkar, dan sikat (brush). Medan magnet yang besarnya
konstan dihasilkan oleh magnet permanen, sedangkan komutator dan sikat
berfungsi untuk menyalurkan arus listrik dari sumber di luar motor ke dalam
kumparan jangkar. Letak sikat di sepanjang sumbu netral dari komutator, yaitu
sumbu dimana medan listrik yang dihasilkan bernilai nol. Hal ini dimaksudkan
agar pada proses perpindahan dari sikat ke komutator tidak terjadi percikan
api.

Gambar 4 Motor DC
Medan stator memproduksi
fluks Φ dari kutub U ke kutub S. Sikat – arang menyentuh terminal kumparan
rotor di bawah kutub. Bila sikat – arang dihubungkan pada satu sumber arus
serah di luar dengan tegangan V, maka satu arus I masuk ke terminal kumparan
rotor di bawah kutub Udan keluar dari terminal di bawah kutub S. Dengan adanya
fluks stator dan arus rotor akan menghasilkan satu gaya F bekerja pada kumparan
yang dikenal dengan gaya Lorentz. Arah Fmenghasilkan torsi yang memutar rotor
ke arah yang berlawanan dengan jarum jam. Kumparan yang membawa arus bergerak
menjauhi sikat – arang dan dilepas dari sumber suplai luar. Kumparan berikutnya
bergerak di bawah sikat – arang dan membawa arus I. Dengan demikian, gaya F
terus menerus diproduksi sehingga rotor berputar secara kontinyu.
III.
PERANCANGAN ALAT
3.1
Perangkat Keras dan Rangkaian Elektronika
Adapun sistem yang digunakan
yaitu :
a.
Modul Driver Motor
b.
Motor DC
c.
Modul RF 433 MHz
3.2
Blok Diagram Hubungan Komponen Utama
Blok diagram aplikasi
Arduino menggunakan masukan Remote RF 433 MHz sebagai
pemancar dengan
luaran motor DC dapat dilihat
pada gambar dibawah ini:

3.3
Perangkat Lunak
Untuk diagram alir, program
aplikasi ARM NUC 120 menggunakan masukan RF
433MHz dan
keluaran Motor DC.
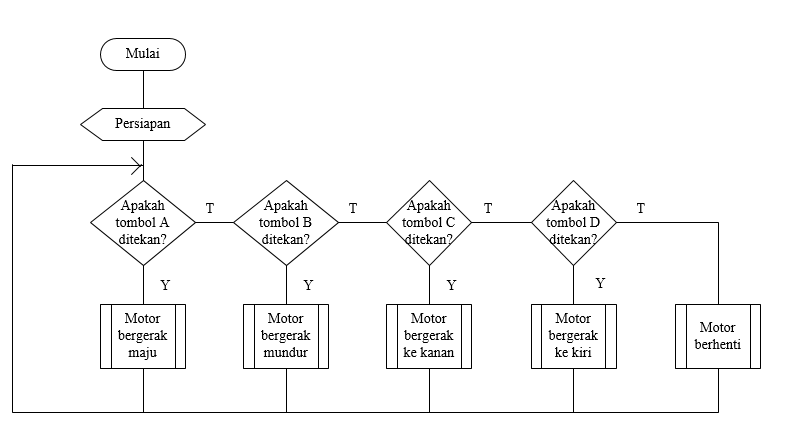 |
Gambar 6 Diagram Alir
3.4 Gambar Rangkaian


3.4 Gambar Rangkaian

Gambar 7 Rangkaian Penggerak Kereta dengan Kendali Remote RF 433 MHz
3.5 Pengawatan

Gambar 8 Pengawatan Luar
 Gambar 9 Pengawatan Dalam
Gambar 9 Pengawatan Dalam

IV.
Cara Kerja
Alat ini
menggunakan RF 433MHz sebagai masukan yang akan diproses oleh NUC 120. RF
433MHz terdiri dari TX (Transmitter) yang berfungsi sebagai pemancar untuk
diterima RX (Receiver) sebagai penerima. Setelah receiver menerima data, maka
akan diproses oleh NUC 120 yang kemudian akan mengendalikan motor dc sebagai
keluaran melalui driver motor. Jenis driver yang digunakan adalah driver motor
L298N.
V.
Pengujian Alat
Pengujian ini
bertujuan untuk mengecek masukan RF 433 MHz. RF 433MHz terdiri dari 4
tombol yang telah diprogram untuk menggerakkan motor ke kiri, kanan, depan,
maupun belakang.
VI.
Kesimpulan
Adapun kesimpulan
dari pembuatan alat ini antara lain:
1. Modul RF 433 MHz berfungsi sebagai masukan yang
dapat menggerakkan output berupa motor dc.
2.
Untuk mengendalikan motor dc digunakan driver motor
L298N.
3.
Motor dc dapat bergerak sesuai perintah yang
diberikan oleh remote.
REFERENSI
[1] Pengatur Kecepatan Motor DC dengan Tombol Tekan (2014)
[2] Pembuka dan Penutup Korden dengan Masukan Joystick dan Keluaran Motor DC Berbasis ARM NUC 120 (2015)
http://belajarmikrokontroler2015.blogspot.co.id/2016/02/pembuka-dan-penutup-korden-dengan.html
http://belajarmikrokontroler2015.blogspot.co.id/2016/02/pembuka-dan-penutup-korden-dengan.html
[3] Kontrol Pemanas dengan Remote Berbasis Radio Frekuensi (2015)
http://belajarmikrokontroler2015.blogspot.co.id/2016/02/kontrol-pemanas-dengan-remote-berbasis.html
[4] Pengatur Posisi Berdasarkan Putaran Motor DC (2016)
http://belajar-mikrokontroler-2016.blogspot.co.id/2017/02/pengatur-putaran-motor-dc-menggunakan_9.html
[5] Pemanas Air dengan Pengendali Jarak Jauh (2016)
http://belajar-mikrokontroler-2016.blogspot.co.id/2017/01/kontrol-pemanas-dengan-remote-berbasis.html
http://belajarmikrokontroler2015.blogspot.co.id/2016/02/kontrol-pemanas-dengan-remote-berbasis.html
[4] Pengatur Posisi Berdasarkan Putaran Motor DC (2016)
http://belajar-mikrokontroler-2016.blogspot.co.id/2017/02/pengatur-putaran-motor-dc-menggunakan_9.html
[5] Pemanas Air dengan Pengendali Jarak Jauh (2016)
http://belajar-mikrokontroler-2016.blogspot.co.id/2017/01/kontrol-pemanas-dengan-remote-berbasis.html

Biodata Penulis
Anisa Chandra Wibawa
Penulis dilahirkan di Pati, 3 Desember 1996. Penulis telah menempuh pendidikan formal di SD Negeri 1 Candimulyo, SMP N 3 Temanggung, dan SMA N 2 Temanggung. Tahun 2015 penulis menyelesaikan pendidikannya di SMA. Pada tahun 2015 penulis mengikuti seleksi mahasiswa baru diploma (D3) dan diterima menjadi mahasiswa baru diploma (D3) di kampus Politeknik Negeri Semarang (Polines) dengan Program Studi D3 Teknik Elektronika, Jurusan Teknik Elektro. Penulis terdaftar dengan NIM. 3.32.15.1.01. Apabila ada kritik, saran dan pertanyaan mengenai penelitian ini, bisa via email: anisachandra4@gmail.com |

Muhammad Zaenal Antoni Cahaya Putra
Penulis dilahirkan di Tuban, 7 Juni 1996. Penulis telah menempuh pendidikan formal di SD Negeri 1 Plumpang, SMP N 1 Plumpang, dan SMK N 1 Tuban. Tahun 2015 Penulis mengikuti seleksi mahasiswa baru diploma (D3) dan diterima menjadi mahasiswa baru diploma (D3) di kampus Politeknik Negeri Semarang (Polines) dengan Pogram Studi D3 Teknik Elektronika, Jurusan Teknik Elektro. Penulis terdaftar dengan NIM 3.32.15.1.14. Apabila ada kritik, saran dan pertanyaan mengenai penelitian ini, bisa via email: zeanalantoni79@gmail.comzeanalantoni79@gmail.com
Lampiran:
1. Presentasi Power Point klik disini
2. Diagram Blok klik disini
3. Diagram Alir klik disini
4. Diagram Pengawatan Luar klik disini










No comments:
Post a Comment