PENGUKUR JARAK AMAN MOBIL DENGAN SENSOR ULTRASONIK

PENGUKUR JARAK AMAN MOBIL DENGAN SENSOR ULTRASONIK
Gugah Dewantoro1,
Ivan Ade Pradipta2, Yuslam Bey Al’Ikhlash3.
Samuel Beta4.
Prodi Eletronika
Jurusan Elektro Politeknik Negeri Semarang
Jl. Prof. H. Soedarto, SH,
Tembalang, Semarang, 50275
Abstract — Safe distance
measuring system is a tool to detect the object in front of the sensor and then
know the distance between them. In making this tool using components that have
been divided into three main parts, namely input, process, and output. The
input component is the HCSR-04 proximity sensor. The input function is to
detect the distance between a sensor-mounted object and an object in front of
it. Then on the process used is arduino uno microcontroller. This is enough to
be used in controlling many components in this tool model. At the external part
of the LCD with I2C, LED, and buzzer. LCD with I2C serves to display the
distance in centimeters. I2C is used to save arduino pins. LED and Buzzer as a
safe distance mark or not.
Keywords
— Arduino Uno, Ultrasonic sensor/ HC SR-04, LCD, I2C, LED, Buzzer
Intisari
— Sistem pengukur jarak aman merupakan sebuah alat untuk mendeteksi adanya
objek di depan sensor kemudian mengetahui jarak diantaranya. Pada pembuatan
alat ini menggunakan komponen – komponen yang telah dibagi menjadi tiga bagian
utama, yaitu masukan, proses, dan luaran. Komponen masukannya adalah sensor
jarak HCSR-04. Fungsi masukan yaitu untuk mendeteksi jarak antara benda yang
dipasang sensor dengan objek didepannya. Kemudian pada bagian proses yang
digunakan adalah mikrokontroller arduino uno. Ini cukup untuk digunakan dalam
mengontrol komponen yang banyak dalam model alat ini. Pada bagian luaran yaitu
LCD dengan I2C, LED, dan buzzer. LCD
dengan I2C berfungsi untuk menampilkan jarak dalam sentimeter. I2C
digunakan untuk menghemat pemakaian pin arduino. LED dan Buzzer sebagai tanda
jarak aman atau tidak.
Kata kunci — Arduino Uno,
Sensor ultrasonic / HC SR-04, LCD, I2C, LED, Buzzer
I
PENDAHULUAN
1.1
Latar Belakang
Dewasa ini dunia otomotif berkembang
dengan sangat pesat, bukan hanya dari segi tampilan, tetapi juga teknologi yang
digunakan. Tidak hanya dari sisi mekanik tetapi juga elektroniknya. Central Lock dan Power Window adalah bukti perkembangan elektronik di dunia otomotif
yang sudah banyak digunakan. Saat ini beberapa mobil juga sudah dilengkapi
sensor jarak yang dapat memberikan peringatan bila berdekatan dengan kendaraan
atau benda lain di sekitarnya untuk menghindari benturan. Benturan atau
tabrakan saat berkendara mobil tidak hanya berasal dari belakang tetapi dalam
beberapa kasus bias terjadi dari samping kanan ataupun kiri. Saat hendak parkir
pun pengemudi tidak hanya memperhatikan bagian belakang. Meskipun ada spion
pada mobil tapi beberapa benturan tidak bias
dihindarkan karena keterbatasan membaca jarak melalui kaca spion. Untuk
itu dibutuhkan alat untuk mendeteksi jarak pada bagian belakang, dan samping
yang menampilkan angka secara akurat dan indikator lainnya. Penulis mengambil
ide tentang Pengukur Jarak Aman Mobil dengan Sensor Ultrasonik sebagai tema
pembuatan Proyek Arduino. Alat yang dibuat nantinya akan menggunakan Arduino Uno
sebagai pemroses, sensor ultrasonik sebagai masukan, dan ditampilkan melalui lcd dengan I2C. Alat ini nantinya masih akan
berupa modul.
1.2
Rumusan Masalah
Berdasarkan
latar belakang diatas maka dapat dirumuskan permasalahan sebagai berikut :
1.
Bagaimana proses dari sensor ultrasonik hingga menghasilkan
jarak dalam sentimeter?
2.
Bagaimana membuat program untuk tiga sensor ultrasonik
sekaligus pada arduino?
3.
Mengapa menggunakan tambahan perangkat I2C pada lcd untuk
dihubungkan ke arduino?
1.3
Ruang Lingkup
Berdasarkan rumusan masalah
diatas agar pembahasan dapat terfokus,
maka yang akan dibahas pada alat ini sebagai berikut :
1.
Alat pengukur jarak aman ini masih dibuat dalam bentuk
prototipe.
2.
HC-SR 04 sensor ultrasonik digunakan sebagai pendeteksi
jarak benda didepan terhadapnya.
3.
Data akan ditampilkan pada lcd, kemudian led dan buzzer
sebagai indikator.
1.4
Tujuan
Tujuan
dari pembuatan alat ini adalah sebagai berikut :
1.
Mengetahui salah satu fungsi dari sensor ultrasonic sebagai
pengukur jarak.
2.
Mampu membuat program arduino untuk sensor ultrasonik dan
perangkat lainnya berdasarkan library
yang disediakan.
3.
Dapat menggunakan modul tambahan untuk menghemat penggunaan
pin – pin arduino.
II
TINJAUAN PUSTAKA
2.1
Arduino Uno
Arduino
merupakan modul atau kit mikrokontroler yang bersifat sumber terbuka baik
piranti keras maupun piranti lunaknya. Pengertian awam, Arduino merupakan
komputer kecil yang dapat di program untuk memproses masukan dan luaran antara
modul itu sendiri dengan komponen eksternal yang dihubungkan dengannya. Arduino
memiliki kompilator program tersendiri menggunakan bahasa C++ yang dilengkapi
dengan program pustaka yang memudahkan para pengguna untuk merancang suatu
program. Perangkat kerasnya terdiri dari pengendali yang memiliki desain
sederhana dengan Atmel AVR sebagai pengolah utama dan pintu masukan serta
luaran yang langsung terpasang pada papan utamanya.

Gambar 2.1 Arduino Uno
Beberapa
macam jenis Arduino dijual dipasaran, salah satunya Arduino Uno dengan tipe
terbaru yaitu Arduino Uno R3. Modul ini memiliki 14 pin masukan/luaran (yang
mana 6 dapat digunakan sebagai PWM output), 6 analog input, keramik resonator
16MHz, koneksi USB, power jack, header ICSP, dan tombol reset, memuat semua
yang dibutuhkan untuk mendukung mikrokontroler. Arduino R3 dapat dihubungkan
langsung ke komputer dengan kabel USB atau dengan mencatu dengan catu daya.
Tabel 2.1 Spesifikasi
Arduino Uno

2.2
HC-SR04

HC-SR04
modul ultrasonik merpakan sensor jarak non-kontak mempunyai fungsi
penginderaan, yang dapat digunakan untuk mengukur jarak kisaran 2cm-400cm, dan
akurasi kisaran hingga 2mm. Modul meliputi pemancar ultrasonik, penerima dan
rangkaian kontrol. Prinsip kerja :
1. Menggunakan
IO trigger untuk memulai setidaknya 10us high level signal,
2. Modul
ini secara otomatis mengirimkan delapan 40 kHz dan mendeteksi apakah ada sinyal
pulsa kembali.
3. Jika
ada sinyal kembali, sampai sampai tinggi, waktu output tinggi IO durasi waktu
dari pengiriman ultrasonik untuk kembali. Uji distance = (high level
time×velocity of sound (340M/S) /2
Kabel
terhubung langsung sebagai berikut:
·
5V Supply
·
Trigger Pulse Input
·
Echo Pulse Output
·
0V Ground
2.3
LCD 16x2
LCD
(Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan
kristal cair sebagai penampil utama. LCD sudah digunakan diberbagai bidang
misalnya alal–alat elektronik seperti televisi, kalkulator, atau pun layar
komputer. Pada postingan aplikasi LCD yang dugunakan ialah LCD dot matrik
dengan jumlah karakter 2 x 16. LCD sangat berfungsi sebagai penampil yang
nantinya akan digunakan untuk menampilkan status kerja alat. Adapun fitur yang
disajikan dalam LCD ini adalah :
a) Terdiri
dari 16 karakter dan 2 baris.
b) Mempunyai
192 karakter tersimpan.
c) Terdapat
karakter generator terprogram.
d) Dapat
dialamati dengan mode 4-bit dan 8-bit.
e) Dilengkapi
dengan back light.

Tabel
2.2 Spesifikasi Kaki LCD 16 x 2
Pin
|
Deskripsi
|
1
|
Ground
|
2
|
VCC
|
3
|
Pengatur kontras
|
4
|
“RS” Instruction/Register Select
|
5
|
“R/W” Read/Write LCD Registers
|
6
|
“EN” Enable
|
7-14
|
Data I/O Pins
|
15
|
VCC
|
16
|
Ground
|
Pada
aplikasi umumnya RW diberi logika rendah “0”. Bus data terdiri dari 4-bit atau
8-bit. Jika jalur data 4-bit maka yang digunakan ialah DB4 sampai dengan DB7.
Sebagaimana terlihat pada table diskripsi, interface LCD merupakan sebuah
parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan
dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang
8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu. Jika mode 4-bit
yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8-bit
(pertama dikirim 4-bit MSB lalu 4-bit LSB dengan pulsa clock EN setiap
nibblenya). Jalur kontrol EN digunakan untuk memberitahu LCD bahwa
mikrokontroller mengirimkan data ke LCD. Untuk mengirim data ke LCD program
harus menset EN ke kondisi high “1” dan kemudian menset dua jalur kontrol
lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus.
Saat
jalur lainnya sudah siap, EN harus diset ke “0” dan tunggu beberapa saat
(tergantung pada datasheet LCD), dan set EN kembali ke high “1”. Ketika jalur
RS berada dalam kondisi low “0”, data yang dikirimkan ke LCD dianggap sebagai
sebuah perintah atau instruksi khusus (seperti bersihkan layar, posisi kursor
dll). Ketika RS dalam kondisi high atau “1”, data yang dikirimkan adalah data
ASCII yang akan ditampilkan dilayar. Misal, untuk menampilkan huruf “A” pada
layar maka RS harus diset ke “1”. Jalur kontrol R/W harus berada dalam kondisi
low (0) saat informasi pada data bus akan dituliskan ke LCD. Apabila R/W berada
dalam kondisi high “1”, maka program akan melakukan query (pembacaan) data dari
LCD. Instruksi pembacaan hanya satu, yaitu Get LCD status (membaca status LCD),
lainnya merupakan instruksi penulisan. Jadi hampir setiap aplikasi yang
menggunakan LCD, R/W selalu diset ke “0”. Jalur data dapat terdiri 4 atau 8
jalur (tergantung mode yang dipilih pengguna), DB0, DB1, DB2, DB3, DB4, DB5,
DB6 dan DB7. Mengirim data secara parallel baik 4-bit atau 8-bit merupakan 2
mode operasi primer. Untuk membuat sebuah aplikasi interface LCD, menentukan
mode operasi merupakan hal yang paling penting.
Mode
8-bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah
aplikasi dan setidaknya minimal tersedia 11 pin I/O (3 pin untuk kontrol, 8 pin
untuk data). Sedangkan mode 4 bit minimal hanya membutuhkan 7-bit (3 pin untuk
kontrol, 4 pin untuk data). Bit RS digunakan untuk memilih apakah data atau
instruksi yang akan ditransfer antara mikrokontroller dan LCD. Jika bit ini di
set (RS = 1), maka byte pada posisi kursor LCD saat itu dapat dibaca atau
ditulis. Jika bit ini di reset (RS = 0), merupakan instruksi yang dikirim ke
LCD atau status eksekusi dari instruksi terakhir yang dibaca.
2.4
I2C
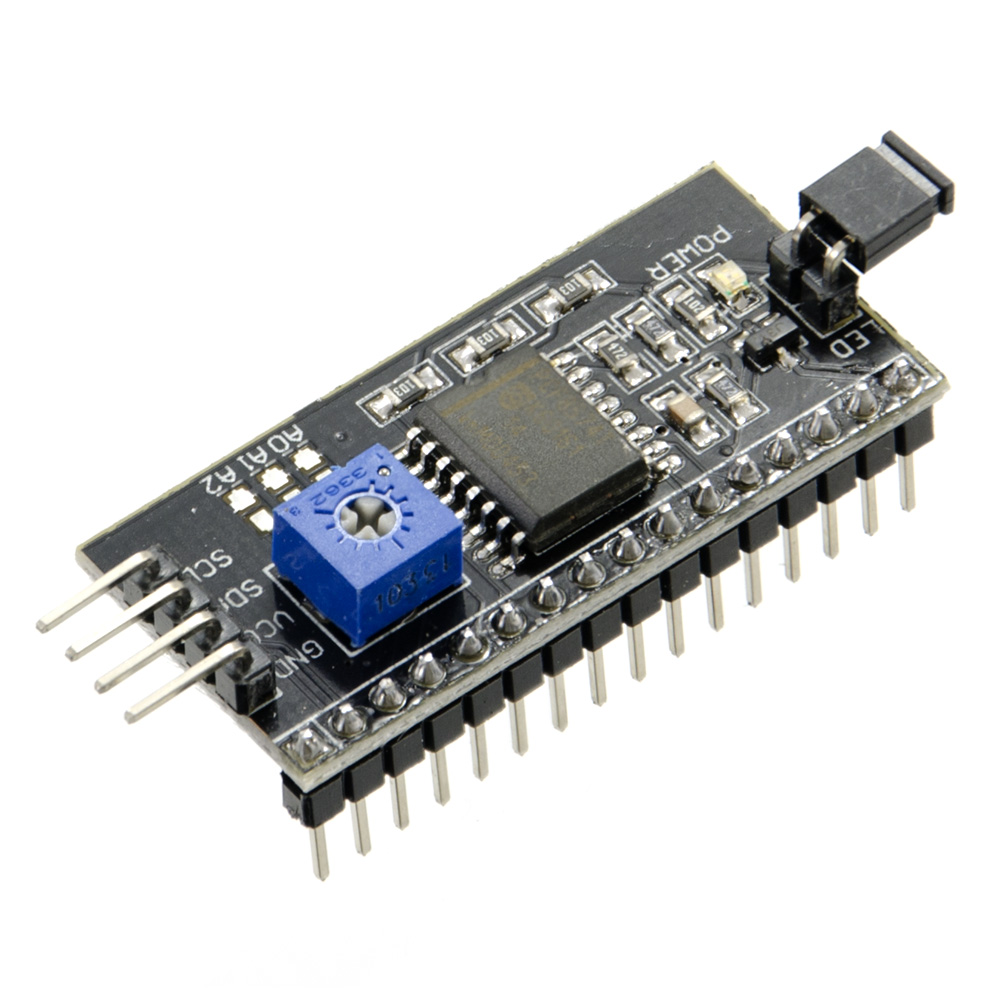
Inter
Integrated Circuit atau sering disebut I2C adalah standar komunikasi serial dua
arah menggunakan dua saluran yang didisain khusus untuk mengirim maupun
menerima data. Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA
(Serial Data) yang membawa informasi data antara I2C dengan pengontrolnya.
Piranti yang dihubungkan dengan sistem I2C Bus dapat dioperasikan sebagai
Master dan Slave. Master adalah piranti yang memulai transfer data pada I2C Bus
dengan membentuk sinyal Start, mengakhiri transfer data dengan membentuk sinyal
Stop, dan membangkitkan sinyal clock. Slave adalah piranti yang dialamati
master.
Pada
umumnya I2C didesain untuk meminimalkan penggunaaan pin pada saat menggunakan
display LCD 16x2. Normalnya sebuah LCD 16x2 akan membutuhkan sekurang-kurangnya
8 pin Arduino dan 1 buah potensiometer untuk dapat diaktifkan. Namun LCD tipe
ini membuat pin yang dibutuhkan hanya 2 saja.
Spesifikasi:
·
I2C Address: 0x20
·
Backlight (Blue with white char color)
·
Supply voltage: 5V
·
Size:82x35x18 mm
·
Weight:40 gram
Untuk
mengubah address I2C, maka pindahkan jumper dengan mengacu pada tabel berikut
(0 berarti jumper terhubung, 1 berarti jumper dilepas).
Tabel
2.3 Spesifikasi alamat I2C
A2
|
A1
|
A0
|
I2C Address
|
0
|
0
|
0
|
0x20
|
0
|
0
|
1
|
0x21
|
0
|
1
|
0
|
0x22
|
0
|
1
|
1
|
0x23
|
1
|
0
|
0
|
0x24
|
1
|
0
|
1
|
0x25
|
1
|
1
|
0
|
0x26
|
1
|
1
|
1
|
0x27
|
2.5
Buzzer

Buzzer terdiri dari kumparan yang terpasang
pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi
elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung
dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma
maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik
sehingga membuat udara bergetar yang akan menghasilkan suara.
2.6
LED
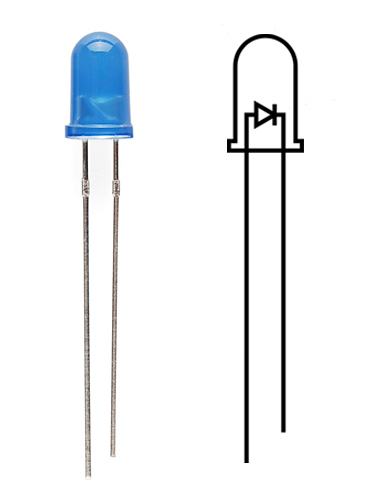
LED terdiri dari sebuah chip
semikonduktor yang di doping sehingga menciptakan junction P dan N. Yang
dimaksud dengan proses doping dalam semikonduktor adalah proses untuk
menambahkan ketidakmurnian(impurity) pada semikonduktor yang murni sehingga
menghasilkankarakteristik kelistrikan yang diinginkan. Ketika LED dialiri
tegangan majuatau bias forward yaitu dari Anoda (P) menuju ke Katoda (N),
Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang
kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material).
Saat Elektron berjumpa dengan hole akan melepaskan photon dan memancarkan cahaya
monokromatik (satu warna).
III PERANCANGAN ALAT
3.1
Diagram Blok
Diagram blok
sistem dirancang untuk dapat mengetahui prinsip kerja keseluruhan sistem
ataupun rangkaian. Tujuan lainnya adalah memudahkan proses perancangan dan
pembuatan pada masing-masing bagian, sehingga dapat dibuat sistem sesuai dengan
yang diinginkan. Berikut adalah diagram blok alat yang ditunjukkan pada gambar
7.

· Ketiga HC SR04 digunakan sebagai masukan untuk mengukur jarak
benda didepan sensor.
·
Arduino uno sebagai kendali algoritma untuk mengolah data
masukan.
·
Tegangan masukan untuk arduino sebesar 5VDC.
·
Sebelum ke kaki lcd pin – pin arduino menuju I2C terlebih
dahulu.
·
Penggunaan I2C untuk menghemat penggunaan pin arduino untuk
lcd.
·
Buzzer digunakan sebagai indikator berupa bunyi yang
memiliki variasi berbeda tergantung jarak terukur.
·
Masing – masing sensor
menentukan nyala dua led yaitu merah dan hijau.
·
Led merah untuk jarak yang sudah
tidak aman dan hijau untuk jarak aman.
3.2
Prinsip Kerja Alat
Alat
ini masih berbentuk prototipe untuk mengukur jarak aman kendaraan dengan sisi
balakang dan sampingnya. Alat ini bekerja pada tegangan 5 VDC dari catu daya.
Sensor ultrasonik yang dipadang pada belakang, kanan, kiri akan mendeteksi
keberadaan benda didepannya. Kemudian data diolah arduino untuk mendapatkan
jarak yang diinginkan. Data akan ditampilkan pada lcd 16x2 berupa angka dalam
satuan sentimeter “cm” dan keterangan apakah jarak dalam keadaan “AMAN”, hati –
hati “AWAS”, ataupun diharuskan berhenti “STOP”. Sebagai indikator ada buzzer
yang diatur dengan variasi berbeda tergantung jarak terukur. Selain buzzer ada
juga led merah dan hijau. Led merah sebagai tanda jarak tidak aman dan hijau
untuk jarak aman.
3.3
Perancangan Perangkat Keras
Membuat
rancangan perangkat keras meliputi pembuatan rangkaian elektronik untuk catu
daya dan sistem secara keseluruhan. Berikut adalah gambar dari rangkaian yang
dibuat.
- Rangkaian Catu Daya
Dalam perancangan
perangkat keras ini menggunakan IC regulator 7805 dan IC 7809 maka dapat
dihasilkan tegangan yang dibutuhkan untuk mengaktifkan komponen yaitu sensor,
arduino, dan motor

- Rangkaian alat
Pada gambar di
bawah ini ditunjukkan keseluruhan rangkaian untuk alat pengukur jarak aman
dilengkapi dengan pengawatan yang menunjukkan terletak di pin mana saja masukan
dan luaran alat.


Gambar 3.3 Rangkaian
Tabel 3.1 Pin pin yang
digunakan di arduino pada rangkaian
Pin
|
Fungsi
|
A0
|
Trig sensor kiri
|
A1
|
Echo sensor kiri
|
3
|
Trig sensor belakang
|
4
|
Echo sensor belakang
|
5
|
Trig sensor kanan
|
6
|
Echo sensor kanan
|
7
|
Buzzer
|
8
|
Led merah kiri
|
9
|
Led hijau kiri
|
10
|
Led merah belakang
|
11
|
Led hijau belakang
|
12
|
Led merah kanan
|
13
|
Led merah kiri
|
A4
|
SDA (I2C)
|
A5
|
SCL (I2C)
|
Pada gambar dibawah ini ditunjukkan pengawatan pin arduino
dengan komponen lainnya.



3.4 Perancangan Perangkat Lunak
Perancangan ini digunakan untuk mengatur kinerja keseluruhan dari sistem yang terdiri dari beberapa perangkat keras sehingga sistem ini dapat bekerja dengan baik dan untuk mengolah data masukan agar menghasilkan keluaran yang sesuai dengan yang dikehendaki. Untuk memberikan gambaran umum jalannya program dan memudahkan pembuatan perangkat lunak, maka dibuat diagram alir yang menunjukan jalannya program. Diagram alir program ditunjukan pada gambar dibawah :

Gambar 3.5 Diagram Alir

Gambar 3.6 Diagram Alir Sub Program
IV PENGUJIAN ALAT
4.1
Pengujian
Pengujian
dilakukan dengan meletakkan papan datar didepan sensor pada beberapa sampel
jarak. Jarak peletakan benda diukur dengan alat ukut panjang berupa penggaris.
Berikur tabel pengukurannya.
Tabel 5 Hasil Pengukuran
No
|
Jarak (cm)
|
Hasil Pengukuran (cm)
|
LED Hijau
|
LED Merah
|
Buzzer
|
1
|
0
|
2.4
|
Mati
|
Nyala
|
Nyala
|
2
|
5
|
5.2
|
Mati
|
Nyala
|
Nyala
|
3
|
10
|
10.3
|
Nyala
|
Mati
|
Nyala
|
4
|
15
|
15.1
|
Nyala
|
Mati
|
Nyala
|
5
|
20
|
20.0
|
Nyala
|
Mati
|
Nyala
|
6
|
25
|
25.3
|
Nyala
|
Mati
|
Nyala
|
7
|
30
|
30.7
|
Nyala
|
Mati
|
Nyala
|
8
|
35
|
35.3
|
Nyala
|
Mati
|
Nyala
|
9
|
40
|
40.4
|
Nyala
|
Mati
|
Nyala
|
10
|
45
|
45.0
|
Nyala
|
Mati
|
Nyala
|
11
|
50
|
50.2
|
Nyala
|
Mati
|
Nyala
|
12
|
55
|
55.0
|
Nyala
|
Mati
|
Nyala
|
13
|
60
|
59.2
|
Nyala
|
Mati
|
Nyala
|
14
|
65
|
64.5
|
Nyala
|
Mati
|
Nyala
|
15
|
70
|
69.0
|
Nyala
|
Mati
|
Nyala
|
16
|
75
|
75.0
|
Nyala
|
Mati
|
Nyala
|
17
|
80
|
80.0
|
Nyala
|
Mati
|
Nyala
|
18
|
85
|
84.3
|
Nyala
|
Mati
|
Nyala
|
19
|
90
|
90.0
|
Nyala
|
Mati
|
Nyala
|
20
|
95
|
94.9
|
Nyala
|
Mati
|
Nyala
|
21
|
100
|
99.5
|
Nyala
|
Mati
|
Nyala
|
22
|
110
|
107.2
|
Nyala
|
Mati
|
Nyala
|
23
|
120
|
119.2
|
Nyala
|
Mati
|
Nyala
|
24
|
130
|
129.0
|
Nyala
|
Mati
|
Nyala
|
25
|
140
|
137..0
|
Nyala
|
Mati
|
Nyala
|
26
|
150
|
148.3
|
Nyala
|
Mati
|
Nyala
|
V
PENUTUP
5.1
Kesimpulan
- Proses untuk mengukur jarak saat sensor mengeluarkan
sinyal ultrasonik hingga akhirnya mengenai benda didepannya. Sinyal akan
kembali dan diterima sensor. Setelah data didapatkan akan diolah arduino
dengan dimasukkan ke persamaan untuk menghasilkan jarak dalam sentimeter.
- Program tiga sensor sekaligus pada arduino tidak bisa
dilakukan dalam satu fungsi loop
langsung. Jika dilakukan sensor tidak akan bekerja. Masing – masing data
sensor harus diolah dalam sub program sebelum masuk ke fungsi loop.
- Perangkat I2C digunakan untuk menghemat penggunaan pin
arduino saat dihubungkan dengan LCD yang pada umumnya menggunakan hingga 7
pin menjadi 2 pin saja, yaitu SDA dan SCL.
Daftar Pustaka
[1] Ruang Inspirasi. (2017). Definisi
HC-SR04 LM 35 Atmega 328 Atmega 16 dan ULN 2003. [Online]. Tersedia: http://hatta-cules.blogspot.co.id/2013/12/definisi-hc-sr04-lm-35-atmega-328.html
[15 Oktober 2017].
[2] Indraharja. (2017). Pengertian
Buzzer. [Online]. Tersedia: https://indraharja.wordpress.com/2012/01/07/pengertian-buzzer/
[15 Oktober 2017].
[3] Scirbd. (2017). Prinsip Kerja LED.
[Online]. Tersedia: https://www.scribd.com/document/346535160/Prinsip-Kerja-Led
[15 Oktober 2017].
[4] Purnomosejati’s Weblog. (2017).
Mengenal Komunikasi I2C (Inter Integrated Circuit). [Online]. Tersedia: https://purnomosejati.wordpress.com/2011/08/25/mengenal-komunikasi-i2cinter-integrated-circuit/
[15 Oktober 2017].
[5] Les Elektronika. (2017). Liquid
Crystal Display (LCD) 16 x 2. [Online]. Tersedia: http://www.leselektronika.com/2012/06/liguid-crystal-display-lcd-16-x-2.html
[15 Oktober 2017].
Belajar Mikrokontroler 2016
[6] http://belajar-mikrokontroler-2016.blogspot.co.id/2017/02/simulasi-pengukur-jarak-aman-mobil.html
Download disini:
- Laporan
- Paper
- Presentasi
- Program [PDF]
- Program Arduino
- Diagram Alir
- Diagram Alir Sub Program
- Diagram Blok
- Rangkaian
- Pengawatan
- Simulasi Proteus

Nama
penulis Yuslam Bey Al’Ikhlash. Penulis dilahirkan di Kota Salatiga 3 Juli 1996.
Penulis telah menempuh pendidikan formal di SD Negeri Pendrikan Lor 03-04
Semarang, SMP Negeri 7 Semarang, dan SMK Negeri 7 Semarang. Tahun 2015 penulis telah menyelesaikan
pendidikan SMK. Pada tahun 2015 penulis mengikuti seleksi mahasiswa baru
diploma (D3) dan diterima menjadi mahasiswa baru diploma (D3) di kampus
Politeknik Negeri Semarang (Polines) dengan Program Studi D3 Teknik
Elektronika, Jurusan Teknik Elektro. Penulis terdaftar dengan NIM 3.32.15.3.23.
Apabila ada kritik dan saran yang membangun serta apabila terdapat beberapa
pertanyaan mengenai penelitian ini, bisa menghubungi: yuslamb51@gmail.com

Nama
penulis Gugah Dewantoro. Penulis dilahirkan di Kota Semarang 18 Desember 1997.
Penulis telah menempuh pendidikan formal di SD Negeri Kartini 03-04 Semarang,
SMP Negeri 14 Semarang, dan SMA Negeri 11 Semarang. Tahun 2015 penulis telah menyelesaikan
pendidikan SMA. Pada tahun 2015 penulis mengikuti seleksi mahasiswa baru
diploma (D3) dan diterima menjadi mahasiswa baru diploma (D3) di kampus
Politeknik Negeri Semarang (Polines) dengan Program Studi D3 Teknik
Elektronika, Jurusan Teknik Elektro. Penulis terdaftar dengan NIM 3.32.15.3.09.
Apabila ada kritik dan saran yang membangun serta apabila terdapat beberapa
pertanyaan mengenai penelitian ini, bisa menghubungi: gugah.dewantoro11@gmail.com
 Nama
penulis: Ivan Ade Pradipta. Penulis dilahirkan di Kota Semarang, 14 Juni 1996.
Penulis telah menempuh pendidikan formal di SD Perumnas Banyumanik 03-12
Semarang, SMP Negeri 21 Semarang, dan SMK Negeri 7 Semarang.
Nama
penulis: Ivan Ade Pradipta. Penulis dilahirkan di Kota Semarang, 14 Juni 1996.
Penulis telah menempuh pendidikan formal di SD Perumnas Banyumanik 03-12
Semarang, SMP Negeri 21 Semarang, dan SMK Negeri 7 Semarang.
Tahun 2015 penulis telah menyelesaikan
pendidikan SMK. Pada tahun 2015 mengikuti seleksi mahasiswa baru diploma 3 (D3)
dan diterima menjadi mahasiswa baru diploma 3 (D3) di kampus Politeknik Negeri
Semarang (Polines) dengan Program Studi D3 Teknik Elektronika, Jurusan Teknik
Elektro. Penulis terdaftar dengan NIM 3.32.15.3.10. Apabila ada kritik dan
saran yang membangun serta apabila terdapat beberapa pertanyaan mengenai
penelitian ini, bisa menghubungi: ivanadepra@gmail.com
Nama
pengajar Samuel Beta. Beliau mengajar di program studi Teknik Elektronika, Jurusan
Teknik Elektro, Politeknik Negeri Semarang. Email : sambetak2@gmail.com










No comments:
Post a Comment