PENGATUR POSISI KETINGGIAN
PENGATUR POSISI
KETINGGIAN
Helmi
Adi Pradana1, Prasetyo Muhammad Sakti2,
Samuel
BETA3
Prodi
Teknik Elektronika Jurusan Teknik Elektro Politeknik Negeri Semarang
Jl.
Prof. H. Soedarto, SH, Tembalang, Semarang, 50275
Abstrak
Dalam
perkembangan dan kemajuan teknologi sekarang ini, banyak masyarakat yang
kesusahan untuk memindahkan barang ketempat yang lebih tinggi, selain berat
juga ketinggian yang tidak dapat dicapai. Seperti memindakan barang ke rak yang
tinggi, atau untuk memindahkan barang dari lantai dasar ke lantai atas. Semua
itu membutuhkan tenaga yang banyak jika hanya menggunakan tenaga manusia. Maka
dari itu kami menciptakan alat Pengatur Posisi Ketinggian ini untuk membantu
memudahkan manusia untuk memindahkan barang dari tempat yang rendah ke tempat
yang tinggi maupun sebaliknya.
Alat
ini menggunakan ARM sebagai alat pemrosesnya. Masukan dari alat ini menggunakan
papan tombol 4x4 untuk menentukan ketinggian yang ingin dicapai dan
potensiometer geser untuk umpan balik apakah sudah mencapai keposisi yang
diinginkan atau belum. Keluaran alat ini menggunakan motor DC untuk mengatur
posisi ketinggian tersebut dan Layar Penampil untuk menampilkan posisi
ketinggian yang sudah dicapai.
Kata Kunci : ARM, Potensiometer, Keypad, LCD,
Motor
Abstract
In today's technological developments and advancements, many
societies are in dire straits to move goods to higher ground, in addition to
the weight and the unattainable heights. Such as taking goods to a high shelf,
or to move things from the ground floor to the upper floors. All that requires
a lot of power if only using human labor. Therefore we created this Elevator
Positioning tool to help make it easier for humans to move goods from low
places to high places and vice versa.
This tool uses ARM as its processing tool. The input of this
tool uses a 4x4 keypad to determine the height to be achieved and the sliding
potentiometer for feedback whether it has reached the desired position or not.
The output of this tool uses a DC motor to adjust the height position and the
Viewer Screen to display the altitude position that has been achieved.
Keywords: ARM, Potentiometer, Keypad, LCD, Motor
1.
PENDAHULUAN
1.1 Latar
Belakang
Dalam perkembangan dan kemajuan teknologi
manusia menganggap bahwa sistem kendali merupakan hal yang penting dalam
kehidupan sehari-sehari, contohnya lemari pendingin, AC, mesin cuci, pompa air,
dan mobil. Kemajuan dalam teori dan praktek kendali dapat mempertinggi laju
produksi, memudahkan performasi sistem dan meniadakan pekerjaan rutin yang
membosankan. Komputer digital misalnya, peranannya penting untuk analisa,
desain dan operasi sistem kendali. Akhir-akhir ini, sudah banyak penggunaan
alat-alat kontrol digital dalam berbagai bidang, diantaranya kontrol kualitas
produk-produk industri, sistem kendali penerbangan, kontrol persenjataan,
sistem kendali transportasi dan robotik.
Posisi linear merupakan suatu parameter
yang dapat dikendalikan, contohnya didalam industri untuk menyimpan
barang-barang hasil produksi di rak / lemari bertingkat, maka memasang kendali
posisi linear agar barang hasil produksi tersebut bisa dijangkau atau ditempatkan
ke tempat yang diinginkan.
1.2 Rumusan
Masalah
Berdasarkan latar belakang diatas maka
dapat dirumuskan permasalahan sebagai berikut:
a.
Bagaimana
membuat dan merancang alat Pengatur
Posisi Ketinggian?
b. Bagaimana cara menampilkan hasil pengukuran pada sebuah tampilan LCD
16x2?
c. Bagaimana cara mengatur alat Pengatur Posisi Ketinggian agar sesuai dengan ketinggian yang sebenarnya?
1.3 Ruang
Lingkup
Berdasarkan rumusan masalah diatas, agar pembahasan terfokus pada
perumusan masalah yang akan dibahas pada alat ini sebagai berikut :
a.
Sensor potensiometer
geser untuk memberi umpan balik agar motor bisa berada diketinggian yang
diinginkan.
b.
Papan tombol yang berfungsi sebagai masukan
akan mengirim data untuk motor berapa ketinggian yang sedang dituju.
1.4 Tujuan
Tujuan dari pembuatan
Proyek Arduino ini adalah :
a. Membantu memindahkan barang dari tempat rendah ketempat yang
lebih tinggi tanpa mengeluarkan tenaga yang banyak.
b. Menampilkan hasil ketinggian pada sebuah tampilan LCD 16x2 agar lebih mudah dalam
pembacaannya.
c. Membuat inovasi untuk menciptakan alat yang mudah digunakan dengan
biaya terjangkau.
2
TINJAUAN PUSTAKA
2.1 Potensiometer
Slider
Potensiometer adalah
salah satu jenis Resistor yang Nilai Resistansinya dapat diatur sesuai dengan
kebutuhan Rangkaian Elektronika ataupun kebutuhan pemakainya. Potensiometer
merupakan Keluarga Resistor yang tergolong dalam Kategori Variable Resistor.
Secara struktur, Potensiometer terdiri dari 3 kaki Terminal dengan sebuah shaft
atau tuas yang berfungsi sebagai pengaturnya.

Gambar
2.1 Potensiometer Slider
2.2 Papan Tombol
Papan Tombol
merupakan sebuah rangkaian tombol yang tersusun atau dapat disebut "pad“. Biasanya terdapat
huruf, angka dan simbol-simbol tertentu. Papan Tombol yang digunakan adalah papan
tombol 4x4 yang berfungsi sebagai masukan data dan patokan dari kerja motor.

Gambar 2.2 Papan Tombol
2.3 Motor DC
Motor DC adalah jenis motor listrik yang bekerja menggunakan sumber
tegangan DC. Motor DC digunakan
pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau
percepatan yang tetap.
Motor DC berfungsi untuk penggerak pointer agar mencapai keketinggian yang
diinginkan.

Gambar 2.3 Motor DC
2.4 ARM NUC120RXXBN
DT-ARM
C120 Board merupakan modul pengembangan mikrokontroler NUC120RD2BN yang
berbasis CPU ARM Cortex-M0 dari Nuvoton. Modul ini dapat bekerja dengan
kecepatan CPU
sampai dengan 48 MHz. Modul ini juga telah dilengkapi dengan bootloader
internal, sehingga tidak diperlukan lagi device programmer eksternal.
Pemrograman melalui bootloader bisa dilakukan dengan menggunakan koneksi USB.

Gambar
2.4 ARM NUC120RXXBN
2.5 LCD (Liquid Crystral Display)
LCD (Liquid Cristal
Display) adalah salah satu jenis display elektronik yang dibuat dengan
teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi
memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau
mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display) berfungsi
sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik.
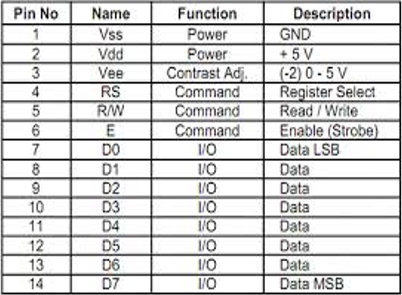
Tabel 2.1 pin LCD 16x2

Gambar 2.5 LCD 16x2
3. METODOLOGI
PENELITIAN
Metode
yang digunakan dalam pembuatan pemantau kecepatan dan arah angin
adalah sebagai berikut:
1.
Metode
Persiapan
Berisikan
tentang pemilihan materi serta jurnal yang akan dijadikan dasar atau literatur
dalam pembuatan pengatur posisi
ketinggian.
2.
Metode
Perencanaan
Menentukan
rancangan sistem, alat, serta program aplikasi yang akan digunakan dalam
pembuatan pengatur posisi ketinggian.
3.
Metode
Perancangan
Proses
pembuatan pengatur posisi ketinggian. Pembuatan program sensor ketinggian yaitu
potensiometer geser dan
sebagai masukan dan LCD sebagai luaran pada Arduino Uno.
4. Pengujian Alat
Melakukan
pengujian pengatur posisi ketinggian. Apakah sudah sesuai rencana atau belum.
5.
Tahap
Penyusunan Laporan
Menyusun
laporan hasil dari pembuatan alat dalam bentuk laporan penelitian.
4. PERANCANGAN
ALAT
Bab ini akan dibahas tentang perancangan dan pembuatan
pengatur posisi ketinggian. Perancangan sistem ini meliputi perancangan perangkat lunak (software) dan perangkat keras (hardware).
4.1
Perangkat keras dan Rangkaian Elektronika
Adapun komponen yang digunakan adalah:
1.
Potensiometer
Slider
2.
Papan
Tombol
3.
Motor
Dc
4.
ARM NUC120RXXBN
5.
LCD 16x2
4.2
Perancangan Diagram Blok
Blok diagram pengatur posisi ketinggian. Luaran dari modul ini akan ditampilkan pada LCD.
Berikut ini adalah blok diagram pengatur
posisi ketinggian.

Gambar 4.1 Diagram Blok
4.3
Cara Kerja Alat
Masukan dari sistem ini adalah sensor potensiometer geser dan papan
tombol 4x4. Pada sistem kendali ini sensor posisi akan membaca posisi aktual dan hasil pembacaan sensor dibandingkan dengan nilai set point sehingga didapatkan nilai error, nilai error tersebut merupakan masukan dari kendali, output kendali berupa besaran
tegangan yang akan mengendalikan sebuah driver motor
dua arah, sehingga motor akan menggerakkan posisi pointer sesuai dengan set
point. Seluruh parameter seperti nilai set point
dan posisi pointer
akan ditampilkan di layar
LCD.
4.4
Perancangan Perangkat Keras
Membuat
rancangan perangkat keras meliputi pembuatan rangkaian elektronik untuk
catu daya dan sistem secara keseluruhan. Berikut adalah gambar dari
rangkaian yang dibuat.
1. Rangkaian catudaya
Dalam perancangan
perangkat keras ini menggunakan IC regulator 7805 dan Ic 7809 maka dapat
dihasilkan tegangan yang dibutuhkan untuk mengaktifkan komponen yaitu ARM dan
luaran yang digunakan.

Gambar 4.2 Rangkaian catudaya
2. Rangkaian alat
Pada gambar
di bawah ini ditunjukkan keseluruhan rangkaian yang dilengkapi dengan
pengawatan yang menunjukkan terletak di pin mana saja masukan dan luaran alat.

Gambar 4.3 Rangkaian alat
Pada gambar
dibawah ini ditunjukkan pengawatan pin ARM dengan komponen lainnya.

Gambar 4.4 Pengawatan luar dalam

Gambar 4.5 Pengawatan luar

Gambar 4.6 Pengawatan dalam
4.5
Perancangan Perangkat Lunak
Perangkat lunak ini berfungsi untuk mengatur kinerja
secara keseluruhan dari sistem. Perangkat lunak untuk
alat ini menggunakan software CooCox CoIDE. Untuk memberikan
gambaran umum jalannya program dan memudahkan pembuatan perangkat lunak maka
dibuatlah diagram alir sebagai berikut:
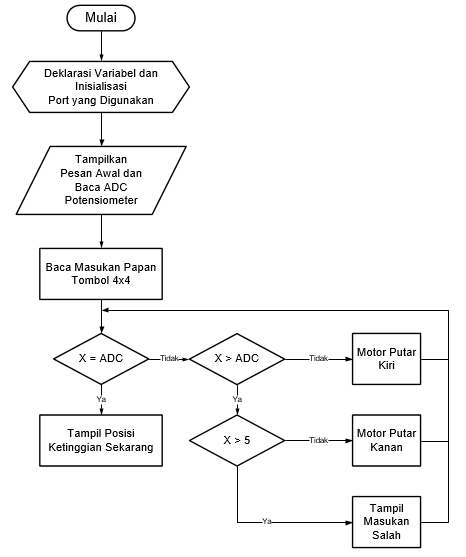
Gambar 4.7
Diagram Alir
5.
HASIL


DAFTAR PUSTAKA
Download:
1. Program dan library ARM2. Program PDF
3. Gambar Rangkaian
4. Diagram Alir
5. Diagram Blok
6. Pengawatan dalam
7. Pengawatan Luar
8. Presentasi
9. Jurnal
10. Laporan
BIODATA

Nama penulis Helmi Adi Pradana. Penulis dilahirkan di kabupaten Kudus tanggal 18 November 1997. Penulis telah menempuh pendidikan formal di, MI Muhammadiyah 01 Kudus, SMP N 01 Jati Kudus, dan SMK Muhammadiyah Kudus. Tahun 2015 penulis telah menyelesaikan pendidikan SMK. Pada tahun 2015 penulis mengikuti seleksi mahasiswa baru diploma (D3) dan diterima menjadi mahasiswa baru diploma (D3) di kampus Politeknik Negeri Semarang (Polines) dengan Program Studi D3 Teknik Elektronika, Jurusan Teknik Elektro. Penulis terdaftar dengan NIM. 3.32.15.0.12. Apabila ada kritik, saran, dan pertanyaan mengenai penelitian ini, bisa menghubungi melalui email: helmi.adipradana@gmail.com

Nama penulis: Prasetyo
Muhammad Sakti. Penulis dilahirkan di Semarang, tanggal 7 Oktober 1997,
Penulis telah menempuh pendidikan formal MIN Tinawas, SMP N 7 Surakarta, dan
SMK N 2 Surakarta. Tahun 2015 penulis menyelesaikan pendidikan SMK Pada tahun
2015 penulis mengikuti seleksi mahasiswa baru. Kemudian diterima menjadi
mahasiswa baru diploma (D3) di kampus Politeknik Negeri Semarang (Polines)
dengan Program Studi D3 Teknik Elektronika, Jurusan Teknik Elektro. Penulis
terdaftar dengan NIM. 3.32.15.0.07. Apabila ada kritik, saran, dan
pertanyaan mengenai penelitian ini, bisa menghubungi via email:
prasetyo.0724@gmail.com










No comments:
Post a Comment